2016/2017 õppeaasta
S U V E P U H K U S !
35.- 38. NÄDAL
08.05 - 02.06.2017
Õppemissioon nr 4: värvide tajumine
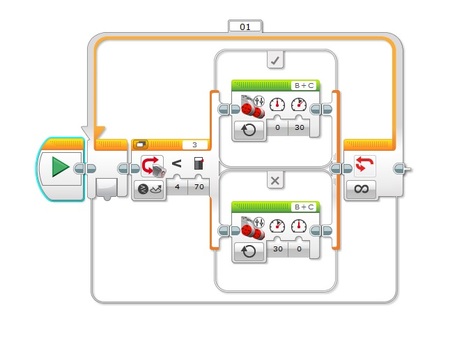
Programm 6: peatu kindla värvi peale
Must joon.
Programm 6: peatu kindla värvi peale
Must joon.

32.- 34. nädal
17.04.- 05.05.2017

EV3 VÄRVIANDUR
Värviandur suudab tuvastada värvi või valguse intensiivsust, mida ta "näeb".
- Anduril on 3 olekut: (1) värvituvastus, (2) peegelduva valguse ja (3) ümbritseva keskkonna valguse intensiivsuse tuvastus
- 7 värvi, mida andur tuvastada suudab: must, sinine, roheline, kollane, punane, valge ja pruun ja lisaks seda, kui värvi üldse ei ole
- Täpse mõõtmise jaoks on oluline värvianduri lähedus mõõdetavale pinnale ja õige nurk
Õppemissioon nr 4: värvide tajumine
Värvide õigel tajumisel on väga oluline roll piisaval valgustugevusel ja värvianduri õige nurga all ja mõõdetavale värvile piisavalt lähedale paigutamisel.
Kui valgustingimused on muutuvad, tuleks täpsete värvide lugemisele eelistada valgustugevuse vahemikke ning programmi alguses teha valgustugevuse vahemiku kalibreerimine.
Kui valgustingimused on muutuvad, tuleks täpsete värvide lugemisele eelistada valgustugevuse vahemikke ning programmi alguses teha valgustugevuse vahemiku kalibreerimine.
29.- 31. nädal
27.03.- 14.04.2017

EV3 GÜROANDUR
- mõõdab nurkasid täpsusega +/- 3 kraadi
- Güro kiirus kuni 440 kraadi sekundis
- Sample rate 1 kHz
Õppemissioon nr 3: Pööramine andurit kasutades
28. nädal
20.03. - 24.03.2017
Kevadvaheaeg
23.- 27. nädal
20.02. - 18.03.2017

Programm 1: sõida otse ja tagurda
Õppemissioon nr 2: täpsed pöörded
Programm 2: pööra kohapeal
Õppemissioon nr 2: täpsed pöörded
Programm 2: pööra kohapeal
www.youtube.com/watch?v=b36n2JQCTWk&feature=youtu.be
www.youtube.com/watch?v=311AidncB_0&feature=youtu.be
www.youtube.com/watch?v=311AidncB_0&feature=youtu.be
21.- 22. nädal
30.01. - 17.02.2017
Esimene praktiline osa: hammasrattad
www.youtube.com/watch?v=bobPtJcdZgA&feature=youtu.be
Mis on selle hammasülekande suhe?
www.youtube.com/watch?v=bobPtJcdZgA&feature=youtu.be
Mis on selle hammasülekande suhe?
18. - 20. nädal
09.-27.01.2017
Kosmose väljakutse: mehitatud missioon Marsile!
- Treeningmatid
- Missioonimudelite ehitamine
16.- 17. nädal
26.12.2016 - 08.01.2017
Talvevaheaeg
14. - 15. nädal
12. - 25.12.2016
Alustame tööd Lego Kosmose tegevuste paketiga.


12. -13. nädal
28.11. - 11.12.2016
Roboti programmeerimine tarkvaraga Edware.
Robotile vajaliku tarkvara Edware leiad siit: https://meetedison.com/robot-programming-software
Katsetused triipkoodiga.
Robotile vajaliku tarkvara Edware leiad siit: https://meetedison.com/robot-programming-software
Katsetused triipkoodiga.
10. -11. nädal
14. - 27.11.2016

8. - 9. nädal
31.10 - 13. 11.2016
Ettevalmistused Isadepäeva töötoaks "Etteantud raja läbimine".
Juhend:
Roboti poolt läbitud vahemaa leidmiseks pead teadma
Ratta ümbermõõt on 17,6 cm.
Isadepäev toimus 10. novembril.
Juhend:
Roboti poolt läbitud vahemaa leidmiseks pead teadma
- ratta ümbermõõtu;
- rattpöörete arvu.
Ratta ümbermõõt on 17,6 cm.
Isadepäev toimus 10. novembril.





7. nädal
24. - 30. 10.2016
Sügisvaheaeg
4. - 6. nädal
03. - 23.10. 2016
Ettevalmistused ülekooliliseks ürituseks "Joone jälgimine".
Raja valmistamine, testimine, materjalide koostamine jne.
Üritus toimus 21. oktoobril.
Raja valmistamine, testimine, materjalide koostamine jne.
Üritus toimus 21. oktoobril.



2. - 3. Nädal
19.09 - 02.10.2016
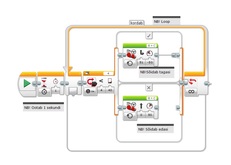
Robot sõidab mööda joont.
Kogu programm asub korduses Loop, mille sees kontrollitakse värvianduri Colour Sensor väärtust. Värviandur on ühendatud porti 3.
Tegevuste paletilt on võetud plokk Move Tank.
Kogu programm asub korduses Loop, mille sees kontrollitakse värvianduri Colour Sensor väärtust. Värviandur on ühendatud porti 3.
Tegevuste paletilt on võetud plokk Move Tank.
1. Nädal
12. - 18.09.2016

Sissejuhatus.
Tuletame meelde:
Tuletame meelde:
- Millest robot koosneb?
- Programmeeritav EV3 kontroller.
- Mootorid, andurid.
2015/2016 õppeaasta
s u v e p u h k u s !
14. tund
18.05.2016
Paneme robotid omavahel võistlema.
Võidab robot kes lükkab teise ringist välja.
Võidab robot kes lükkab teise ringist välja.
13. tund
16.05.2016
Ekraan.
Ekraani kasutamine.
Ekraani kasutamine.
12. tund
11.05.2016
Raja läbimine.
Kordame. Parandame programmi.
Kordame. Parandame programmi.
11. tund
09.05.2016
Raja läbimine.
10. tund
04.05.2016
Kooli õppeekskursioon.
9. tund
02.05.2016
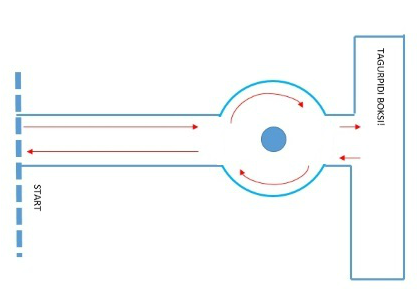
Robot sõidab boksi!
Robot tagurdab boksi!
Robot tagurdab boksi!
8. tund
27. 04.2016
Eelmise tunni materjali kordamine. Programmi täiendamine ja parandamine.
7. tund
25.04.2016
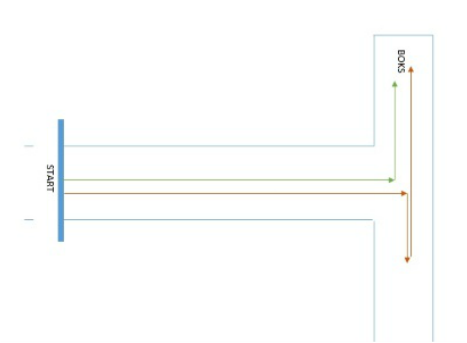
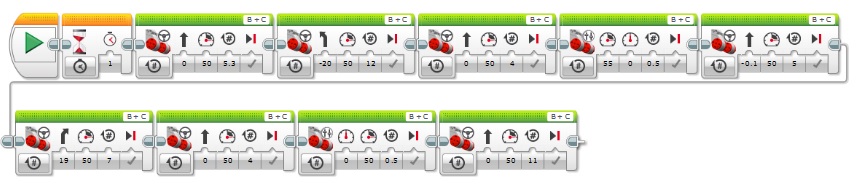
Etteantud raja läbimine.
Roboti poolt läbitud vahemaa leidmiseks pead teadma
Ratta ümbermõõt on 17,6 cm.
Üks lahendustest.
Roboti poolt läbitud vahemaa leidmiseks pead teadma
- ratta ümbermõõtu;
- rattpöörete arvu.
Ratta ümbermõõt on 17,6 cm.
Üks lahendustest.
6. tund
20.04.2016
Etteantud raja läbimine.
Programmeeri robot nii, et ta liiguks kindlal rajal. Rada on märgitud Lego lippudega.
Programmeeri robot nii, et ta liiguks kindlal rajal. Rada on märgitud Lego lippudega.

5. tund
18.04.2016
Ehitame robotid lõpuni.
Kontrollime, et andurid oleks korralikult ühendatud.
Kontrollime, et andurid oleks korralikult ühendatud.
4. tund
13.04.2016
Vaatame üle pooleliolevad programmid.
NB! Robot peab sõitma lõputult edasi, kui näeb objekti peab keerama kõrvale ja edasi sõitma.
Jooksuta programmi ja leia vead!
Meie leitud lahendused...
NB! Robot peab sõitma lõputult edasi, kui näeb objekti peab keerama kõrvale ja edasi sõitma.
Jooksuta programmi ja leia vead!
Meie leitud lahendused...
Lisame baasrobotile kõik andurid
|

|

Puuteandur
|

Värviandur
|
3. tund
11.04.2016
Ultrahelianduri kasutamine.
Hakkame konstrueerima programmi, kus robot väldiks objekte.
Hakkame konstrueerima programmi, kus robot väldiks objekte.
2. TUND
06.04.2016

Kuidas robotit programmeerida?
Programmeerimisplokid.
Ülesanne: Täpse vahemaa läbimine.
Lisame baasrobotile ultrahelianduri.
Ultrahelianduri (kaugusanduri) maksimaalne mõõtmisulatus on 250 cm ja lähim mõõdetav kaugus objektist on 3 cm.
Kaugusanduri mõõtmistäpsus on +/- 1 cm.
Ultraheli on heli, mille sagedus on üle 20 000 Hz. Inimese kõrv ei suuda ultrahelile reageerida.
Ultraheli parimad looduslikud rakendajad on nahkhiired, kes kasutavad seda toidu otsimiseks ja navigeerimiseks.
Programmeerimisplokid.
Ülesanne: Täpse vahemaa läbimine.
Lisame baasrobotile ultrahelianduri.
Ultrahelianduri (kaugusanduri) maksimaalne mõõtmisulatus on 250 cm ja lähim mõõdetav kaugus objektist on 3 cm.
Kaugusanduri mõõtmistäpsus on +/- 1 cm.
Ultraheli on heli, mille sagedus on üle 20 000 Hz. Inimese kõrv ei suuda ultrahelile reageerida.
Ultraheli parimad looduslikud rakendajad on nahkhiired, kes kasutavad seda toidu otsimiseks ja navigeerimiseks.
1. TUND
04.04.2016
Millest robot koosneb?
Programmeeritav EV3 kontroller.
Mootorid, andurid.
EV 3 kiirkursus
EV3 baasroboti ehitamine. Juhend asub siin
Programmeeritav EV3 kontroller.
Mootorid, andurid.
EV 3 kiirkursus
EV3 baasroboti ehitamine. Juhend asub siin

